






1
of
2
Loading...
Unitree | Product Model:
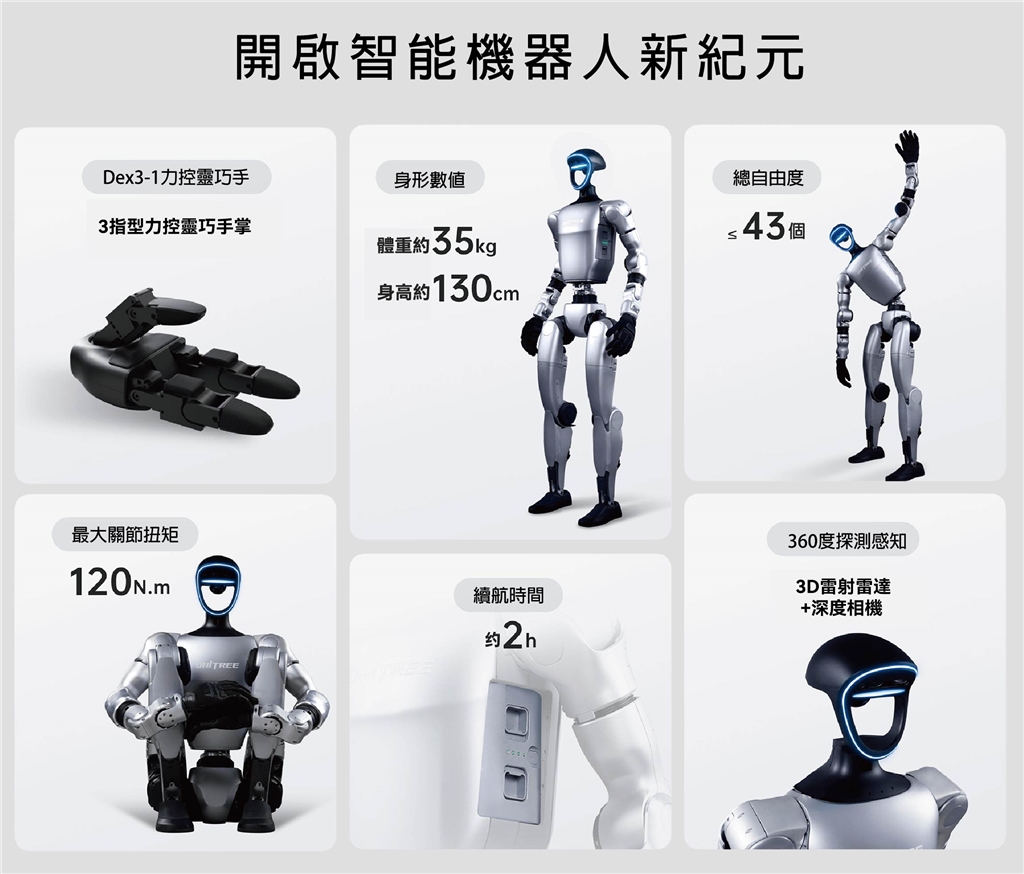
Unitree G1 Intelligent Robot Series
Subtotal
—
Unitree G1 Intelligent Robot Series - is backordered and will ship as soon as it is back in stock.
Choose add-on
Couldn't load pickup availability

Unitree G1 Intelligent Robot Series
Unitree G1 Intelligent Robot Series


Superhuman flexibility
Extra-large joint range of motion, 23 to 43 joint motors.
Extra-large joint range of motion, 23 to 43 joint motors.
Imitation and reinforcement learning driven
Artificial intelligence-accelerated robotics technology is being upgraded and developed every day.
Force control of dexterous hands, manipulating everything
Combined with force-position hybrid control, it is sensitive and reliable, and can simulate the human hand to achieve precise operation of objects.
Combined with force-position hybrid control, it is sensitive and reliable, and can simulate the human hand to achieve precise operation of objects.
Let's create a large-scale robot world model together!
UnifoLM (Unitree Robotics Unified Model): Co-creating a new era of intelligent agents.


Contact us for more information about Unitree robots !
| project | ||
|---|---|---|
| model | G1 | G1 EDU |
| Height, width, and thickness (standing) | 1320x450x200mm | 1320x450x200mm |
| Height, width, and thickness (folded) | 690x450x300mm | 690x450x300mm |
| Weight with battery | Approximately 35kg | Approximately 35kg+ |
| Total degrees of freedom (joint motor) | twenty three | 23 - 43 |
| Single-leg freedom | 6 | 6 |
| Waist freedom | 1 | 1+ (2 additional waist freedom options available) |
| Single-arm freedom | 5 | 5 |
| single-handed freedom | / | 7 (optional force-controlled 3-finger dexterity hand Dex3-1) + 2 (optional 2 wrist degrees of freedom) |
| Parameters of 3-Finger Dex3-1 | - | The thumb has 3 degrees of freedom; the index finger has 2 degrees of freedom; and the middle finger has 2 degrees of freedom. |
| Joint output bearing | Industrial grade crossed roller bearings (high precision, high load capacity) | Industrial grade crossed roller bearings (high precision, high load capacity) |
| Joint motor | Low inertia high-speed internal rotor permanent magnet synchronous motor (better response speed and heat dissipation) | High-speed internal rotor permanent magnet synchronous motor with improved inertia (better response speed and heat dissipation) |
| Maximum torque of the knee joint [1] | 90 N·m | 120 N·m |
| Maximum load on the arm [2] | Approximately 2 kg | Approximately 3 kg |
| Calf + Thigh Length | 0.6M | 0.6M |
| Arm span | Approximately 0.45M | Approximately 0.45M |
| Extra-large joint movement space | Lumbar joint: Z±155° Knee joint: 0~165° Hip joint: P±154°, R-30~+170°, Y±158° |
Lumbar joints : Z±155°, X±45°, Y±30° Knee joint : 0~165° Hip joint : P±154°, R-30~+170°, Y±158° Wrist joint : P±92.5°, Y±92.5° |
| Hollow inner wiring of the entire joint | have | have |
| Joint encoder | Dual encoder | Dual encoder |
| Cooling system | Localized air cooling | Localized air cooling |
| Power supply method | 13-cell lithium battery | 13-cell lithium battery |
| Basic computing power | 8-core high-performance CPU | 8-core high-performance CPU |
| Sensing Sensors | Depth camera + 3D LiDAR | Depth camera + 3D LiDAR |
| 4-microphone array | have | have |
| 5W speaker | have | have |
| WiFi 6, Bluetooth 5.2 | have | have |
| High computing power module | / | NVIDIA Jetson Orin |
| Smart Battery (Quick Release) | 9000mAh | 9000mAh |
| charger | 54V 5A | 54V 5A |
| Handheld remote control | have | have |
| Battery life | Approximately 2 hours | Approximately 2 hours |
| Intelligent OTA upgrade | have | have |
| Secondary development [3] | / | have |